پېژندنه
د ۱۹۶۰ لسیزې له وروستیو او د ۱۹۷۰ لسیزې له لومړیو راهیسې، د هوايي عکاسۍ ډیری دودیز سیسټمونه د هوا او فضايي الکترو-نظري او بریښنایی سینسر سیسټمونو لخوا بدل شوي دي. پداسې حال کې چې دودیز هوايي عکاسي په عمده توګه د لید وړ رڼا طول موج کې کار کوي، عصري هوایی او ځمکني ریموټ سینسنګ سیسټمونه ډیجیټل معلومات تولیدوي چې د لید وړ رڼا، منعکس شوي انفراریډ، حرارتي انفراریډ، او مایکروویو سپیکٹرل سیمې پوښي. د هوایی عکاسي کې دودیز بصري تفسیر میتودونه لاهم ګټور دي. بیا هم، ریموټ سینسنګ د غوښتنلیکونو پراخه لړۍ پوښي، پشمول د اضافي فعالیتونو لکه د هدف ملکیتونو تیوریکي ماډلینګ، د شیانو سپیکٹرل اندازه کول، او د معلوماتو استخراج لپاره ډیجیټل عکس تحلیل.
ریموټ سینسنګ، چې د غیر تماس لرونکي اوږد واټن کشف تخنیکونو ټولو اړخونو ته اشاره کوي، یوه طریقه ده چې د هدف ځانګړتیاوې کشف، ثبت او اندازه کولو لپاره الکترومقناطیسم کاروي او تعریف یې لومړی په 1950 لسیزه کې وړاندیز شوی و. د ریموټ سینسنګ او نقشه کولو ساحه، دا په 2 سینسنګ حالتونو ویشل شوې ده: فعال او غیر فعال سینسنګ، چې له هغې څخه لیډر سینسنګ فعال دی، د دې توان لري چې خپله انرژي وکاروي ترڅو هدف ته رڼا وباسي او له هغې څخه منعکس شوي رڼا کشف کړي.
فعال لیدر حس کول او غوښتنلیک
لیډار (د رڼا کشف او رینج) یوه ټیکنالوژي ده چې د لیزر سیګنالونو د خپریدو او ترلاسه کولو وخت پراساس فاصله اندازه کوي. ځینې وختونه هوایی لیډار د هوایی لیزر سکین کولو، نقشه کولو، یا لیډار سره په متقابل ډول کارول کیږي.
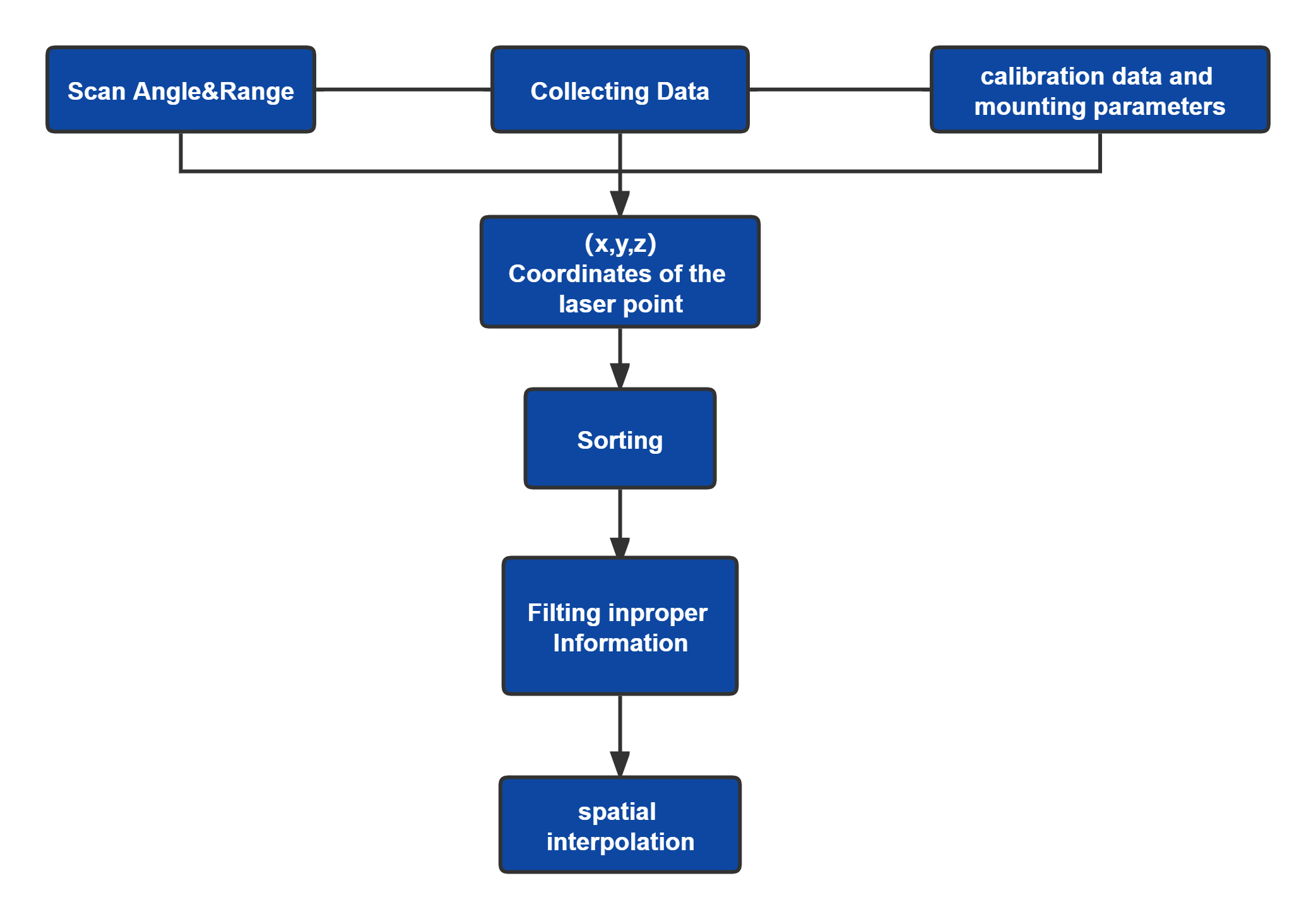
دا یو عادي فلوچارټ دی چې د LiDAR کارولو پرمهال د نقطې معلوماتو پروسس کولو اصلي مرحلې ښیې. د (x، y، z) همغږي راټولولو وروسته، د دې ټکو ترتیب کول کولی شي د معلوماتو وړاندې کولو او پروسس کولو موثریت ته وده ورکړي. د LiDAR ټکو جیومیټریک پروسس کولو سربیره، د LiDAR فیډبیک څخه د شدت معلومات هم ګټور دي.
په ټولو ریموټ سینسنګ او نقشه کولو غوښتنلیکونو کې، LiDAR د لمر وړانګو او نورو هوا اغیزو څخه خپلواک د ډیرو دقیقو اندازه کولو ترلاسه کولو ځانګړې ګټه لري. یو عادي ریموټ سینسنګ سیسټم دوه برخې لري، یو لیزر رینج فائنڈر او د موقعیت لپاره د اندازه کولو سینسر، کوم چې کولی شي په مستقیم ډول جغرافیایي چاپیریال په 3D کې د جیومیټریک تحریف پرته اندازه کړي ځکه چې هیڅ عکس اخیستل پکې شامل ندي (3D نړۍ په 2D الوتکه کې انځور شوې ده).
زموږ د لیدر ځینې سرچینې
د سترګو خوندي LiDAR لیزر سرچینې د سینسر لپاره انتخابونه


